

Construisez votre robot pour 70 euros
Nous vous proposons un guide complet pour construire un robot mobile sans soudure, conçu pour être à la fois simple, fonctionnel et accessible aux débutants.
Partie 1 : présentation du matériel et téléchargement des ressources :
Matériel nécessaire : |
|
|
Vous aurez besoin en plus :
|
|
Vous devez également télécharger les ressources pour programmer votre robot et l'utiliser : |
Partie 2 : Montage du robot de base sans godet
|
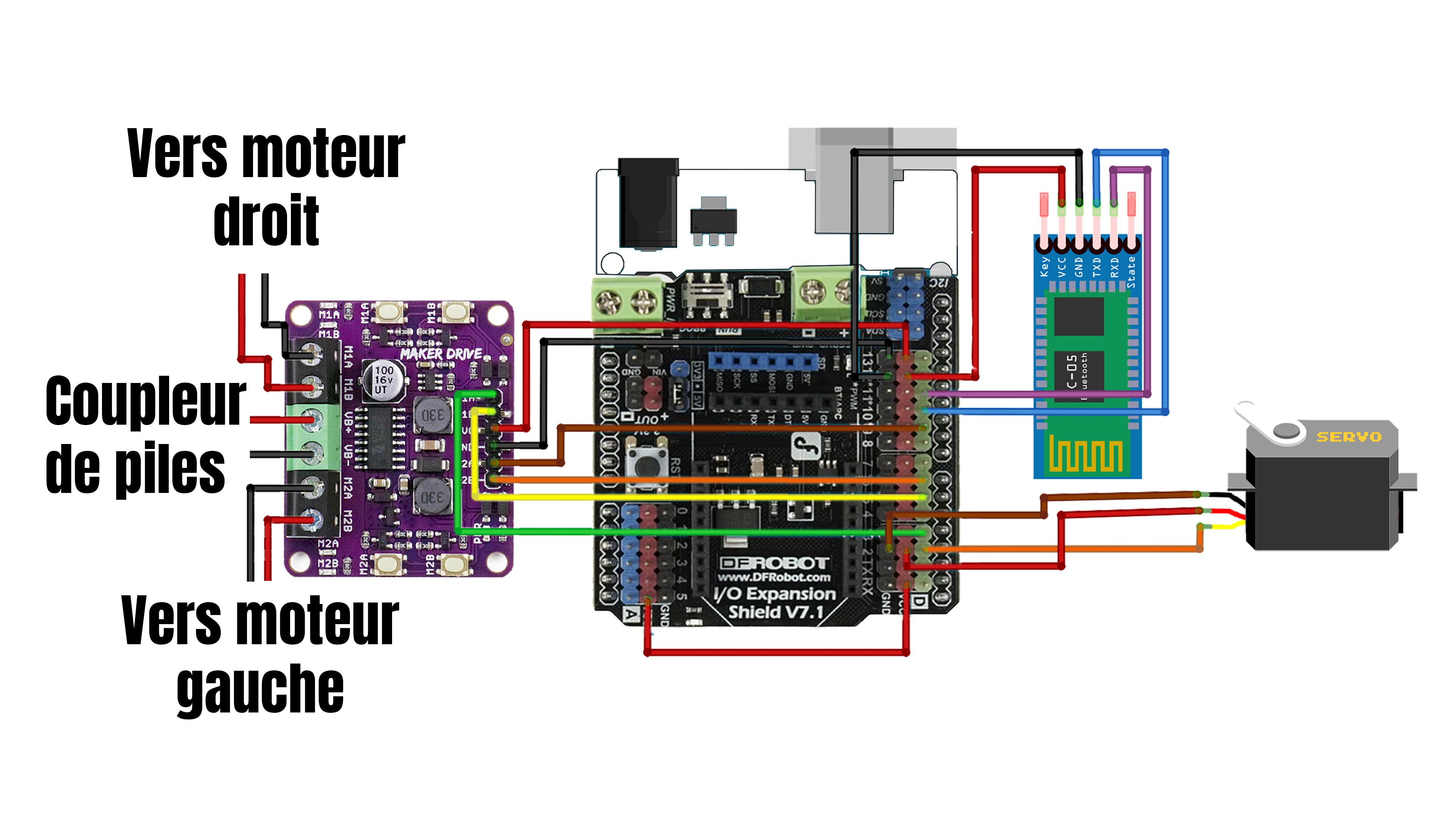
Nous allons maintenant procéder au montage. Dans un premier temps, fixez les moteurs au châssis à l’aide des vis et entretoises prévues à cet effet. Positionnez ensuite la carte Arduino au centre du châssis, puis le support de piles à l’arrière. Le module driver sera placé à proximité de la carte pour faciliter les connexions. Les câbles jumper permettent de relier les moteurs au driver, puis le driver à la carte Arduino. Veillez à bien respecter les polarités et les broches indiquées dans notre schéma de câblage. Une fois les connexions terminées, vous pouvez insérer les piles dans le support et vérifier que tous les éléments sont correctement fixés. |
|
Partie 3 : premier test avec Arduino
|
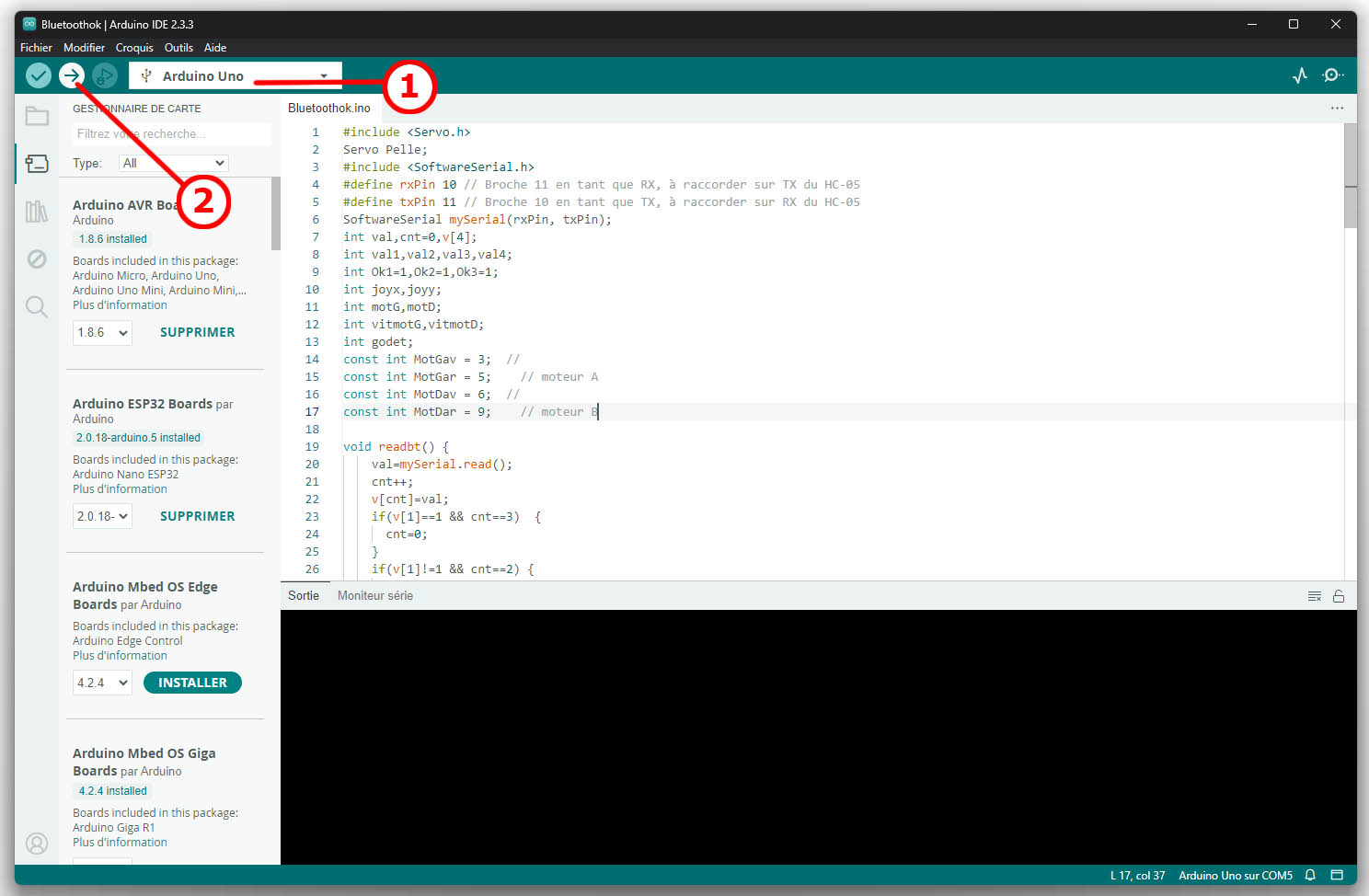
Avant toute chose, installez le logiciel Arduino sur votre ordinateur. Rendez-vous sur le site officiel arduino.cc, rubrique 'Logiciel'. Utilisez le code "testrobot1" disponible dans le dossier que vous avez téléchargé précédement. Ce code permet de valider le fonctionnement du robot : il doit avancer, reculer, puis effectuer une rotation gauche et droite. Branchez votre robot via USB, sélectionnez la bonne carte et le bon port (1), puis téléversez le programme (2). Si tout fonctionne comme prévu, félicitations : votre robot est prêt pour les prochaines étapes. |
 |
Partie 4 : ajout de la pince
|
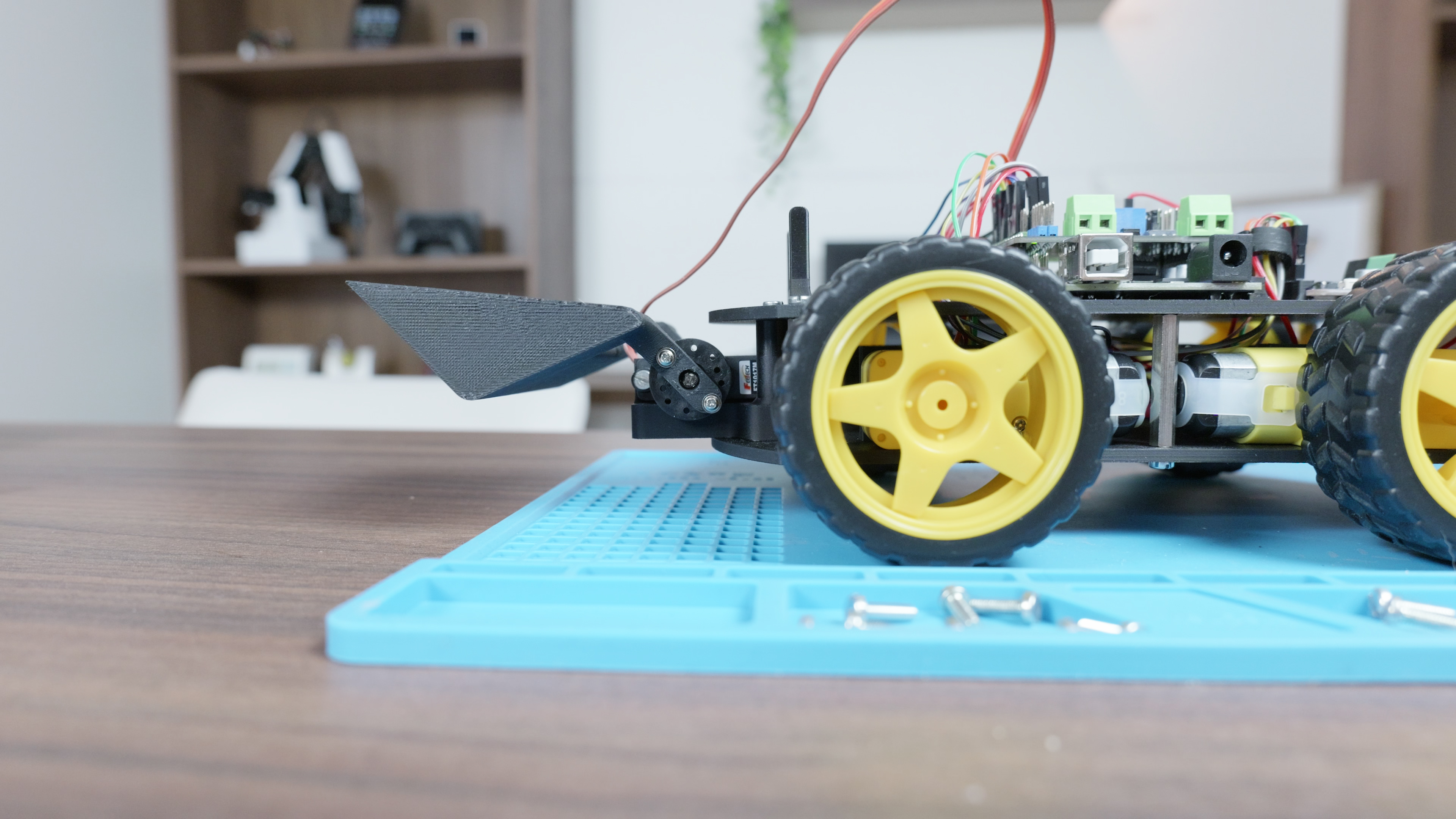
Nous allons maintenant ajouter une pince motorisée à notre robot. Cette pince est conçue pour être imprimée en 3D. Vous trouverez les fichiers STL à télécharger ci-dessus. La pince est actionnée par un servomoteur. Il est important de respecter l’orientation et le positionnement du servo lors de l’assemblage, afin de garantir un mouvement fluide. Fixez le servomoteur à l’intérieur du support prévu dans la pince, puis montez l’ensemble au châssis du robot. Le câblage du servomoteur s’effectue directement sur la carte Arduino : – le fil orange (signal) sur une broche PWM, – le rouge sur le 5V, – et le marron sur GND. Une fois connecté, téléversez le programme Arduino "Servopelle". Il permet de tester la montée et la descente du godet à intervalles réguliers. Votre robot est désormais équipé d’un godet fonctionnel. Il ne reste plus qu’à lui ajouter une interface de contrôle. |
 |
Partie 5 : contrôle par smartphone
|
Nous allons maintenant ajouter un module Bluetooth au robot, afin de pouvoir le piloter directement depuis un smartphone Android. Le module utilisé ici est un HC-05, très simple à mettre en œuvre. Il se connecte à la carte Arduino via les broches RX et TX. Raccordez le module comme suit : – RX du module sur TX de l’Arduino, – TX du module sur RX de l’Arduino, – VCC sur le 5V, – et GND sur GND (se reporter au schéma complet si besoin). Une fois le module connecté, téléchargez l'application Android (lien ci-dessus). Il s'agit d'une application développée sous App Inventor, compatible avec tous les appareils récents. Avant l'installation, pensez à autoriser les sources inconnues dans les paramètres de votre téléphone. Ensuite, installez l’APK, puis lancez l’application. Allumez votre robot, puis associez votre téléphone au module Bluetooth HC-05. Le code d’appairage est généralement “1234” ou “0000”. Une fois connectée, l’interface de l’application vous permet de contrôler les déplacements du robot : avancer, reculer, tourner à gauche, à droite… ainsi que d’ouvrir ou fermer la pince. Vous pouvez désormais tester le robot dans différentes situations. N’hésitez pas à modifier l’interface ou le code Arduino pour adapter le comportement à vos besoins. |
 |
Conclusion
|
Félicitations, vous venez de finaliser la construction de votre robot mobile, équipé d’une pince et contrôlable à distance depuis un smartphone. Ce projet vous a permis de découvrir plusieurs aspects de la robotique personnelle : impression 3D, électronique embarquée, programmation Arduino, et contrôle sans fil. Tous les fichiers nécessaires plans, codes, modèles 3D, application sont disponibles ci-dessus. N’hésitez pas à partager vos réalisations en commentaire et à poser vos questions. Une vidéo ci-dessous permet de faire la synthèse de l'ensemble de la réalisation. On vous souhaite de belles expérimentations avec votre robot, et à très bientôt !
Pour aller plus loin
Vous n’avez pas d’imprimante 3D ? |
Démonstration






Commentaires d'article
Laissez un commentaire